車輪式機械手機器人
聲明:您必須遵守我們的協(xié)議,如果您下載了該資源行為將被視為對《電天下賬號管理規(guī)范》全部內(nèi)容的認可,本網(wǎng)站資源來自原創(chuàng),僅供用于學(xué)習(xí)和交流,請勿用于商業(yè)用途。如有侵權(quán)、不妥之處,請舉報本資源,我們將及時審核處理!
車輪式機械手機器人
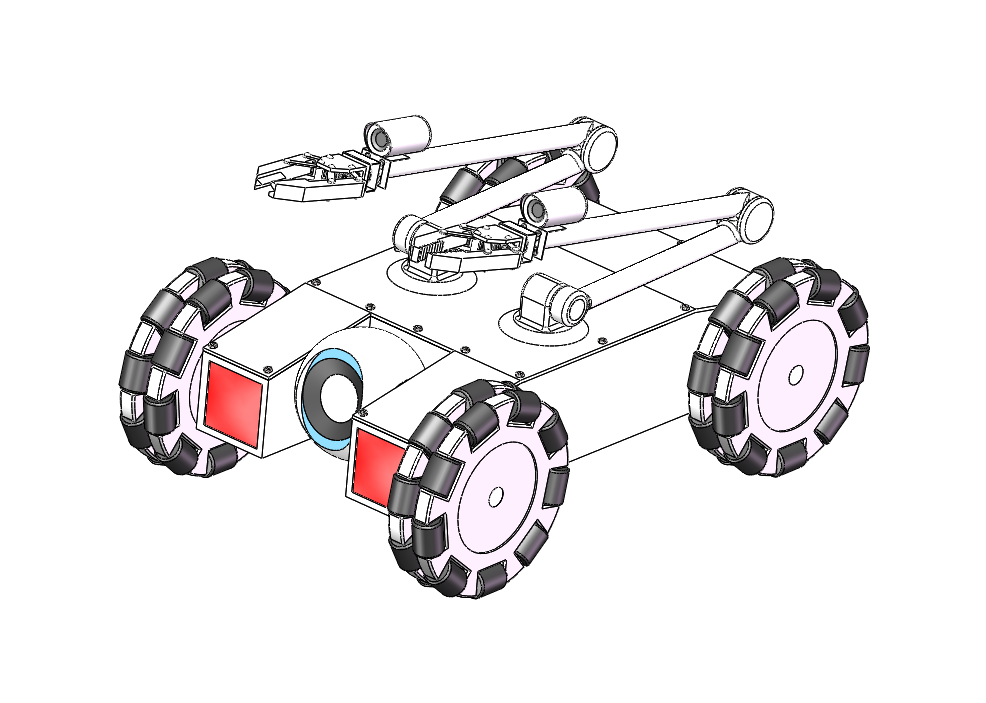
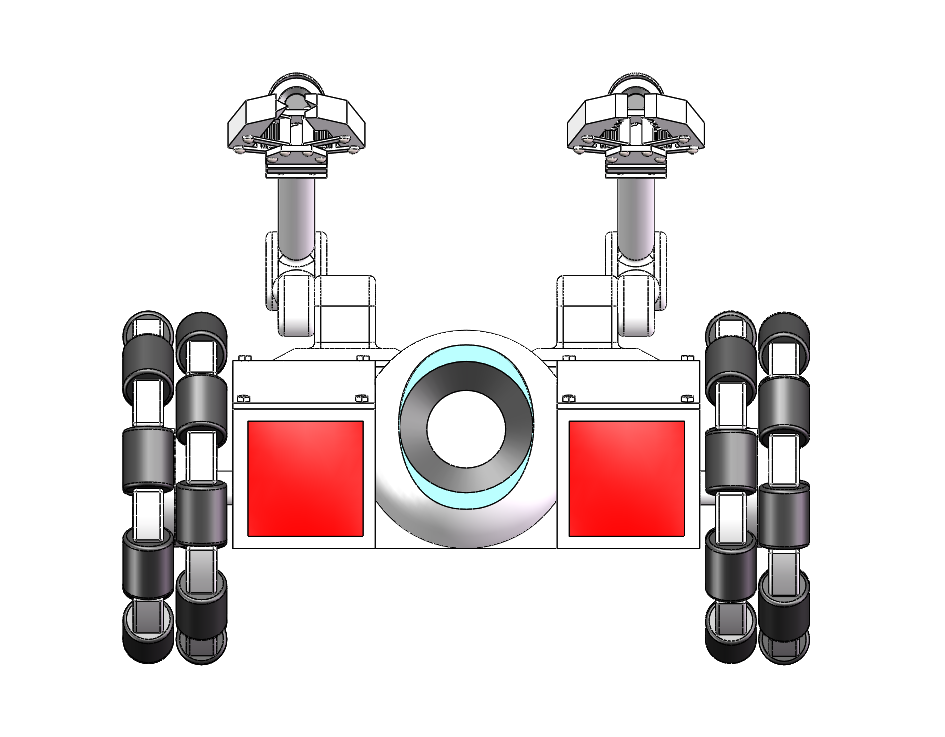
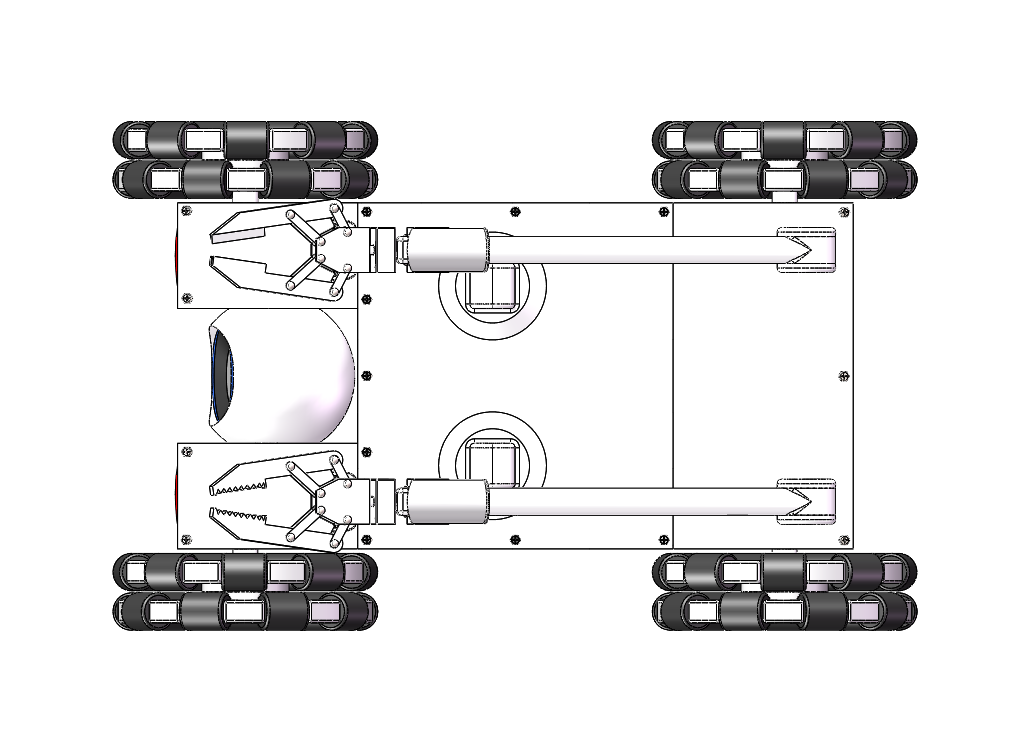
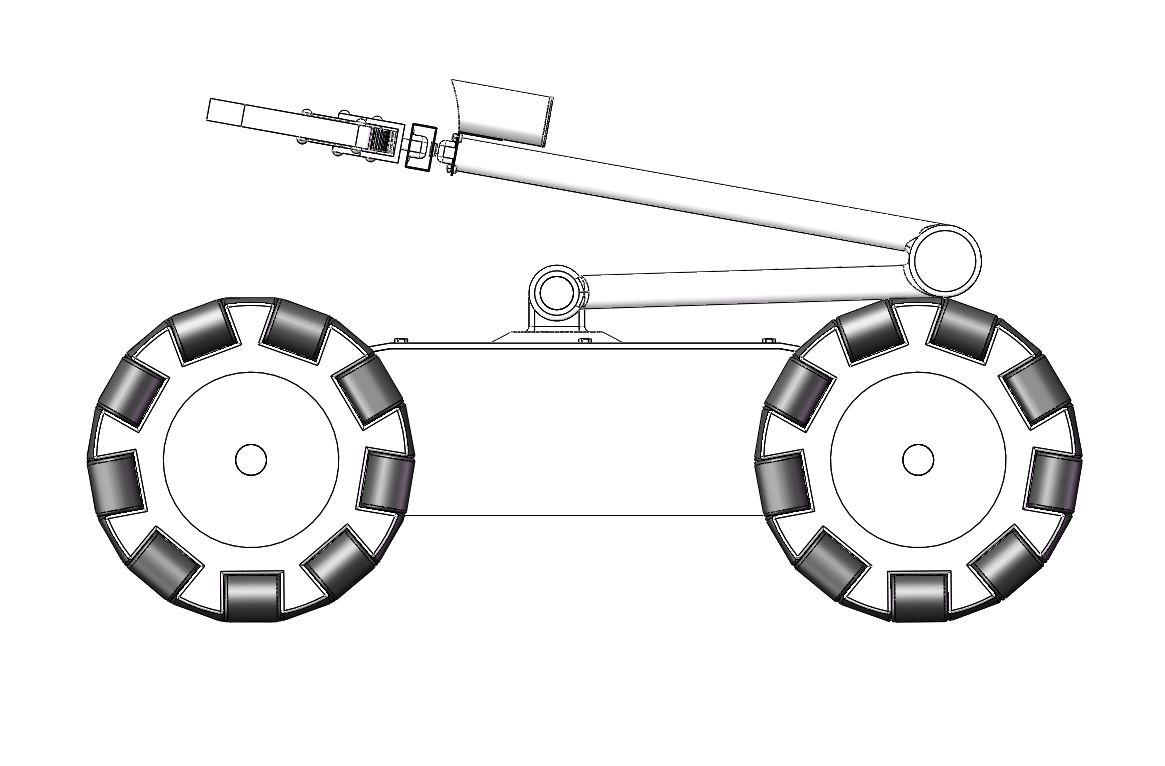
該模型是一款車輪式機械手機器人。車體上裝有獨立的攝像頭,可上下擺動,用于行駛過程中,觀察路況。車體上安裝兩個機械臂,分別裝上剪鉗和夾鉗。剪鉗可以剪斷電線等物件、夾鉗可以挾持物件,兩機械臂配合工作可拆裝炸彈。
 AIGC
AIGC標題:**車輪式機械手機器人**
解釋與描述:
“車輪式機械手機器人”是一種結(jié)合了**機械臂**與**輪式移動平臺**的自動化設(shè)備,主要用于工業(yè)、物流、倉儲、農(nóng)業(yè)及特殊環(huán)境下的作業(yè)任務(wù)。它通過輪子實現(xiàn)靈活移動,同時配備機械臂完成抓取、搬運、裝配、焊接等復(fù)雜操作。
### 核心組成部分:
1. **輪式移動平臺**
采用輪子結(jié)構(gòu)(如全向輪、差速驅(qū)動輪等)實現(xiàn)機器人在地面或特定軌道上的自由移動,具備良好的機動性和適應(yīng)性,適用于平坦或有一定起伏的地面環(huán)境。
2. **機械臂系統(tǒng)**
配備多關(guān)節(jié)機械臂,能夠進行精確的定位和操作,通常具有6自由度(6-DOF),可模擬人類手臂的運動方式,完成抓取、旋轉(zhuǎn)、放置等動作。
3. **控制系統(tǒng)**
由嵌入式控制器、傳感器和軟件算法組成,負責(zé)協(xié)調(diào)移動與機械臂的操作,并實現(xiàn)路徑規(guī)劃、避障、目標識別等功能。
4. **感知模塊**
包括攝像頭、激光雷達、紅外傳感器等,用于環(huán)境感知、目標識別與導(dǎo)航,提升機器人的自主作業(yè)能力。
### 應(yīng)用場景:
- **工業(yè)自動化**:在生產(chǎn)線中搬運物料、裝配零部件。
- **倉儲物流**:自動分揀、堆垛、搬運貨物。
- **農(nóng)業(yè)作業(yè)**:采摘果實、施肥、噴藥等。
- **危險環(huán)境作業(yè)**:如核電站、化工廠、災(zāi)區(qū)救援等需要遠程操作的場景。
### 優(yōu)勢特點:
- **靈活性高**:輪式移動平臺便于在復(fù)雜環(huán)境中穿行。
- **操作精準**:機械臂可完成精細操作,提高工作效率。
- **智能化程度高**:結(jié)合AI技術(shù),具備一定的自主決策和學(xué)習(xí)能力。
- **節(jié)省人力**:適用于重復(fù)性、高強度或危險性高的工作。
如果您有進一步的問題,例如如何選擇適合的車輪式機械手機器人、其核心技術(shù)、成本預(yù)算或具體應(yīng)用案例,歡迎繼續(xù)提問!